Os vetores permitem descrever deslocamentos, direções e sentidos tanto no plano como no espaço. Aqui vamos ver o que define um vetor, como operar com vetores e como trabalhar com as suas coordenadas.
Norma de um vetor
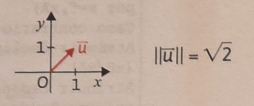
A norma de um vetor v é o comprimento de um segmento orientado que o representa. Escrevemos ∥v∥:
∥v∥=x2+y2
No plano
∥v∥=x2+y2+z2
No espaço
Por exemplo, no plano, se u vai de O(0,0) até (1,1), a norma é ∥u∥=2. No espaço, se v vai de O(0,0,0) até (1,1,1), a norma é ∥v∥=3.
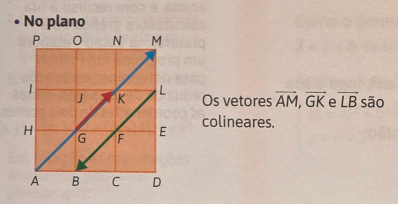
Vetores colineares
Vetores colineares são vetores que têm a mesma direção - ou seja, as retas suporte dos seus representantes são paralelas ou coincidem.
Dois vetores não nulos u e v são colineares se e só se existe λ∈R tal que:
u=λv
Regra prática (por coordenadas)
Como u=λv, cada coordenada de u é λ vezes a coordenada correspondente de v. Na prática, dividimos as coordenadas uma a uma: se os quocientes derem todos o mesmo valor, os vetores são colineares e esse valor é precisamente o λ.
No plano, u(u1,u2) e v(v1,v2) (com as coordenadas de v não nulas) são colineares se e só se:
v1u1=v2u2=λ
No espaço, estende-se à terceira coordenada:
v1u1=v2u2=v3u3=λ
Por exemplo, u(2,6) e v(1,3) são colineares, porque 12=36=2. Então λ=2 e u=2v.
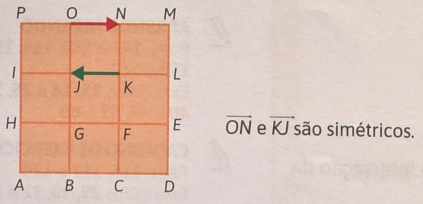
Vetores simétricos
Dois vetores são simétricos quando têm a mesma direção, o mesmo comprimento, mas sentidos opostos. O simétrico de v escreve-se −v.
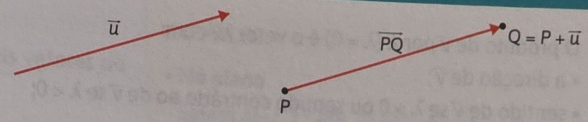
Soma de um ponto com um vetor
Dado um ponto P e um vetor u, existe um único ponto Q tal que u=PQ:
Q=P+u
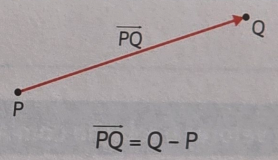
Vetor como diferença de dois pontos
Dados dois pontos P e Q, a diferença Q−P é o vetor PQ:
PQ=Q−P
Qualquer vetor pode ser escrito como a diferença entre o seu ponto extremidade e o seu ponto origem.
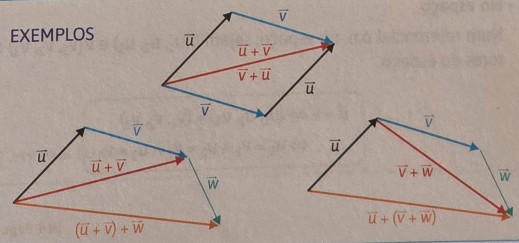
Propriedades da adição de vetores
Comutativa - u+v=v+u
Associativa - (u+v)+w=u+(v+w)
Elemento neutro - u+0=u
Elemento simétrico - u+(−u)=0
Multiplicação por um escalar
O produto de v por um escalar λ (com λ=0) é o vetor λv com:
a mesma direção de v
o mesmo sentido de v se λ>0, ou sentido oposto se λ<0
norma igual a ∣λ∣×∥v∥
Se λ=−1, obtemos o vetor simétrico: (−1)×v=−v.
Um vetor u não nulo é colinear a v se e só se existe um único λ∈R tal que u=λv.
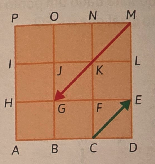
MG=−2CE
Propriedades
Para u , v vetores e λ , μ reais:
(λ+μ)v=λv+μv
λ(u+v)=λu+λv
λ(μv)=(λμ)v
Igualdade de vetores e coordenadas
No plano
Sejam u(u1,u2) e v(v1,v2) dois vetores num referencial o.n. do plano:
u=v⇔u1=v1∧u2=v2
No espaço
Sejam u(u1,u2,u3) e v(v1,v2,v3) dois vetores num referencial o.n. do espaço:
u=v⇔u1=v1∧u2=v2∧u3=v3
Exemplo
Sendo u(a2,a2−a) com a∈R e v(4,2) :
u=v⇔a2=4∧a2−a=2
Da segunda condição: a2−a−2=0 , que dá a=2 ou a=−1. Como a2=4 implica a=2 ou a=−2 , a solução comum é a=2 .
Operações com coordenadas
No plano
Num referencial o.n., dados u(u1,u2) , v(v1,v2) e λ∈R :
Adição: u+v=(u1+v1,u2+v2)
Subtração: u−v=(u1−v1,u2−v2)
Multiplicação por escalar: λu=(λu1,λu2)
Simétrico: −u=(−u1,−u2)
Vetor entre dois pontos A(a1,a2) e B(b1,b2) : AB=(b1−a1,b2−a2)
Soma de ponto com vetor: A+u=(a1+u1,a2+u2)
Norma: ∥u∥=u12+u22
No espaço
Num referencial o.n., dados u(u1,u2,u3) , v(v1,v2,v3) e λ∈R :
Adição: u+v=(u1+v1,u2+v2,u3+v3)
Subtração: u−v=(u1−v1,u2−v2,u3−v3)
Multiplicação por escalar: λu=(λu1,λu2,λu3)
Simétrico: −u=(−u1,−u2,−u3)
Vetor entre dois pontos A(a1,a2,a3) e B(b1,b2,b3) : AB=(b1−a1,b2−a2,b3−a3)
Soma de ponto com vetor: A+u=(a1+u1,a2+u2,a3+u3)